Rubik's Cube solver robot
General
After finishing my bachelor's thesis, I felt that the project wasn’t engaging enough for someone without programming experience. Therefore, I decided to develop some hardware around the software concept and modify certain aspects of it.
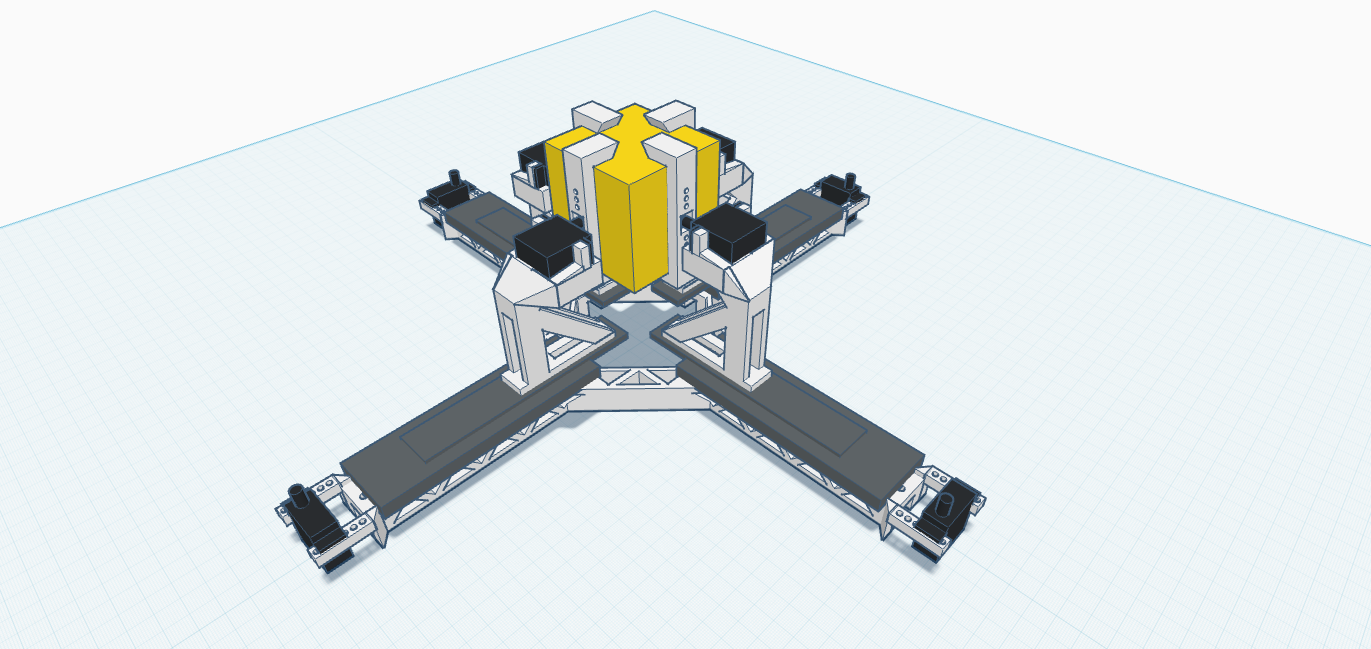
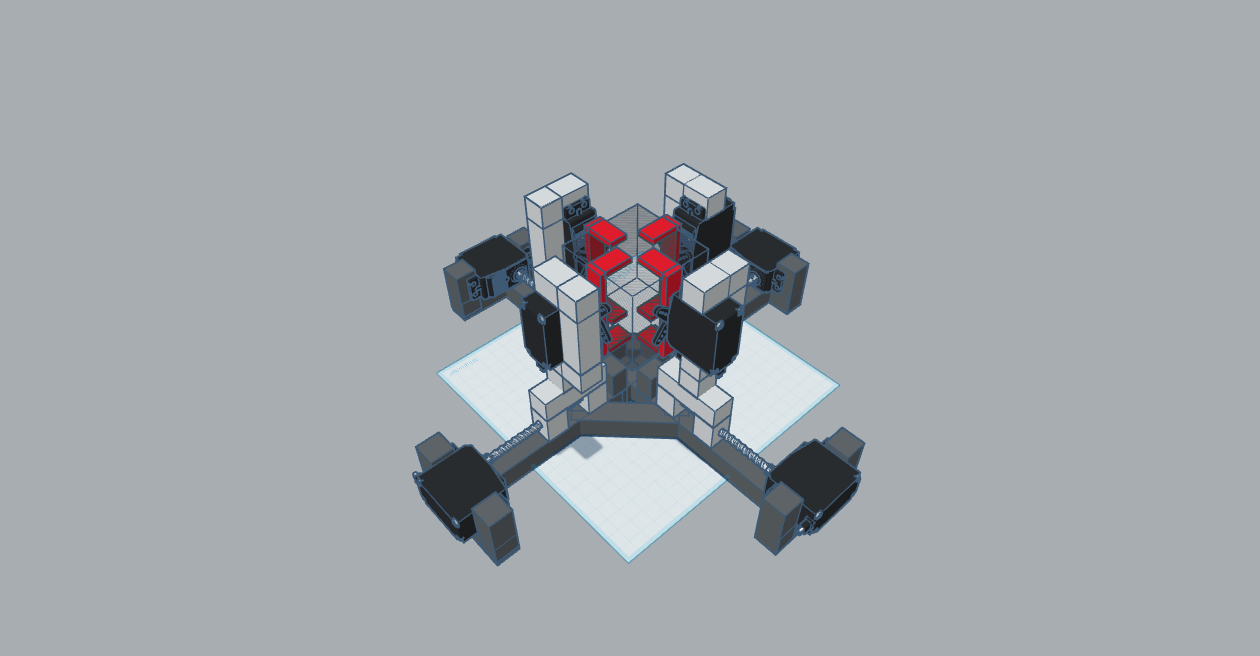
After considering several different methods, I decided to go with the below shown one (the one with the rails and levers). As the project is still in its early stages, detailed plans are still needed before building an actual prototype.
Technical details:
In order to have a working robot I need the following things:
- An Arduino
- A Raspberry Pi
- PCA9685 servo driver
- 4 pieces of 180 servo motors for the rotating grips
- 4 pieces of 180 steel servo motors for the release mechanism
- Raspberry Pi CSI camera modul
Gallery
Current state:
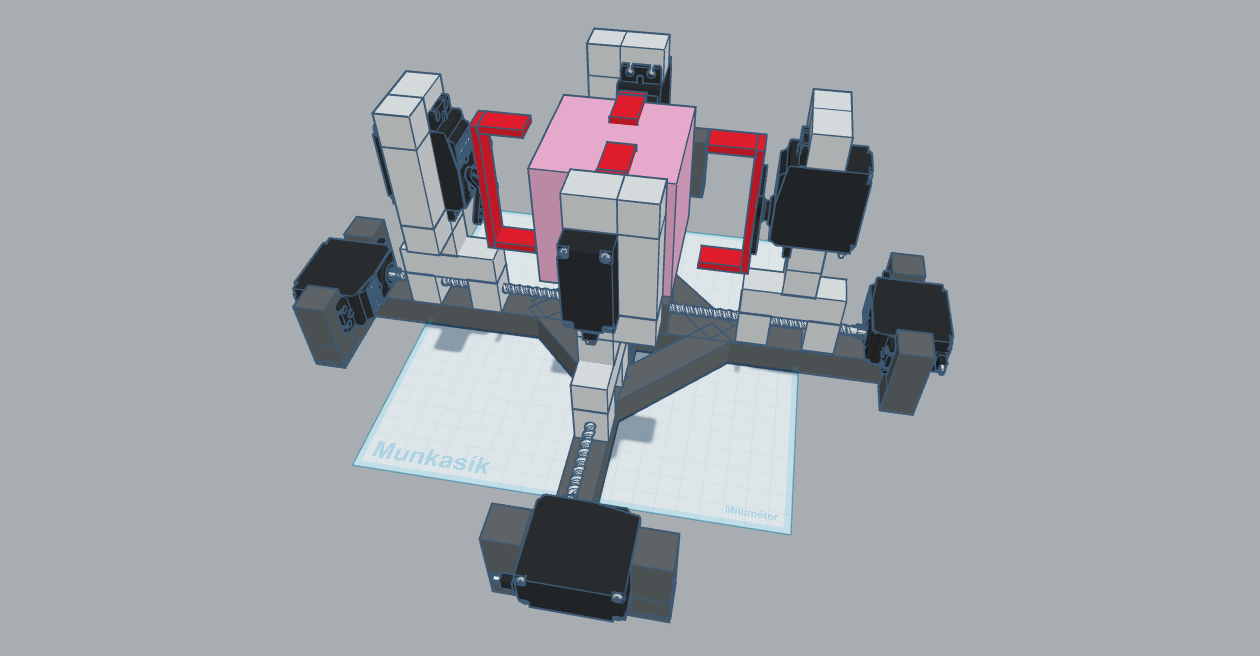
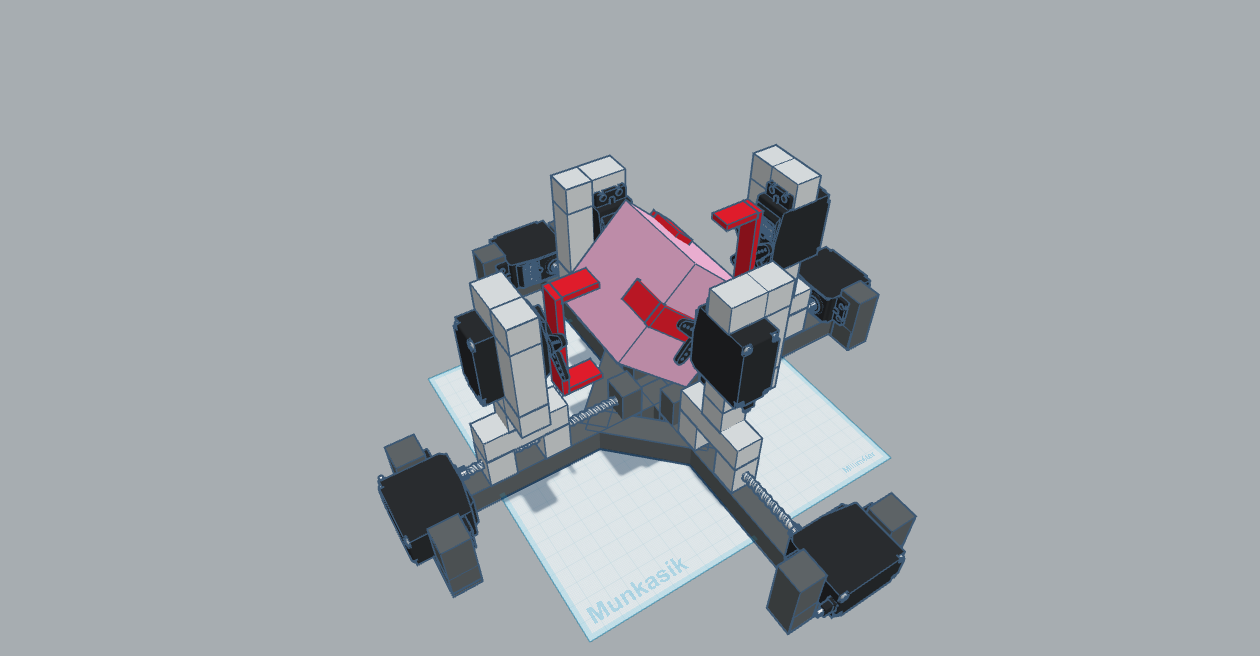
Initial ideas:

The gallery was made using the open-source Lightbox script.